- Hardware e Software -

O
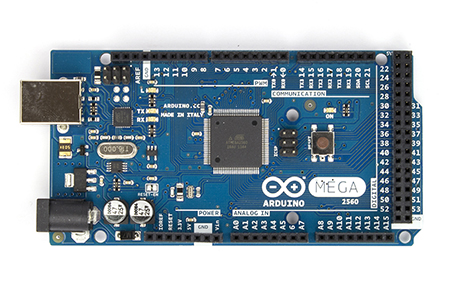
Arduino (acima) é uma plataforma física de computação de código
aberto baseada numa simples placa micro controladora, e um ambiente
de desenvolvimento para escrever o código para a placa. Com ele é
possível criar circuitos interativos através da leitura de dados
com sensores conectados a sua placa, controlando uma variedade de
luzes, motores ou outras saídas físicas. Projetos do Arduino podem
ser independentes, ou podem se comunicar com software rodando em seu
computador (como Flash, Processing, MaxMSP). O software de
programação de código-livre pode ser baixado de graça.
Seus
mantenedores possuem um serviço de venda do produto pré-montado,
mas também é possível ao usuário montar seu próprio sistema, por
se tratar de uma plataforma de hardware livre.
O
projeto para sua realização começou na Itália em 2005, com a
intenção de criar um sistema de prototipagem mais barato do que os
disponíveis naquele momento, para a realização de projetos
escolares. Desde então já recebeu uma menção honrosa na categoria
Comunidades Digitais em 2006, pela Prix Ars Eletrônica e até 2008
já havia vendido mais de 50.000 placas.
O
Arduino pode ser usado para desenvolver objetos interativos,
admitindo entradas de uma série de sensores ou chaves, e controlando
uma variedade de luzes, motores ou outras saídas físicas. Projetos
do Arduino podem ser independentes, ou podem se comunicar com
software rodando em seu computador (como Flash, Processing, MaxMSP.).
Os circuitos podem ser montados à mão ou comprados pré-montados; o
software de programação de código-livre pode ser baixado de graça.
O software Arduino é um ambiente de código aberto escrito em Java e baseado na linguagem Processing e Wiring e foi esquematizado com o objetivo de introduzir programação a pessoas não muito familiarizadas com desenvolvimento de softwares.

Outra
característica interessante do Arduino é que ele permite receber
vários Shields em camadas. Shields são placas adicionais que podem
ser encaixadas sobre o Arduino, permitindo uma infinidade de
aplicações, tais como uma placa de rede como mostra a Figura
abaixo:

Placa
de rede adicionada sobre o Arduino
Existem
diferentes tipos de Arduino e a tabela abaixo nos fornece alguns
destes:
Tabela Interfaces e diferentes tipos de Arduino
Tabela Interfaces e diferentes tipos de Arduino
Modelo
|
Descrição
e tipo de conexão ao hospedeiro
|
Controlador
|
Serial
Arduino
|
Serial
DB9 para programação
|
ATmega8
|
Arduino
Extreme
|
USB
para programação
|
ATmega8
|
Arduino
Mini
|
Versão
em miniatura do Arduino utilizando montagem superficial
|
ATmega168
|
Arduino
Nano
|
Versão
menor que o Arduino Mini, energizado por USB e conectada
por montagem superficial.
|
ATmega168/328
|
LilyPad
Arduino
|
Projeto
minimalista para aplicações portáteis, utilizando montagem
superficial. Por exemplo projetos e sistemas acoplados a roupas.
|
ATmega168
|
Arduino
NG
|
USB
para programação
|
ATmega8
|
Arduino
NG Plus
|
USB
para programação
|
ATmega168
|
Arduino
BT
|
Interface
Bluetooth para comunicação
|
ATmega168
|
Arduino
Diecimila
|
Interface
USB
|
Atmega168
em um pacote DIL28 (foto)
|
Arduino
Duemilanove
|
Duemilanove
significa "2009" em italiano. É energizado via
USB/DC, com alternação automática
|
Atmega168
(Atmega328 para a versão mais nova)
|
Arduino
Mega
|
Montagem
superficial (com mais do que 50 portas)
|
ATmega1280
para E/S adicionais e memória
|
Arduino
Uno
|
Utiliza
Atmega8U2 para driver conversor Serial-USB, "Uno"
significa "Um" em italiano.
Esta versão é considerada a versão 1.0 do projeto, sendo que as placas que sucederem a esta serão referenciadas. |
ATmega328
|
O
projeto do Espectrofotômetro utiliza a verão MEGA R3 2560 (pois o
microcontrolador é o ATmega2560), até porque trabalharemos com uma
placa Ethernet acoplada ao Arduino, além de usarmos, pelo menos 5
sensores - Conversor de Frequência, Ultrassom, Termômetro Digital,
LED, além do próprio motor de passo, fatores que requerem mais
pinos para serem usados. Daí o MEGA (!!).
Abaixo
algumas informações sobre ele.

Por
aqui, fechamos a descrição do Arduino, usos, sua IDE, software, e
tipos utilizados, além de vermos o Arduino que utilizaremos no
experimento...
...Bom, e na seção a seguir, a relação entre um motor de passo e um scanner, além de entender melhor como usaremos este motor no experimento. Até lá!




















{kind=link}
{kind=link}